|
Grade Crossing Program Description |
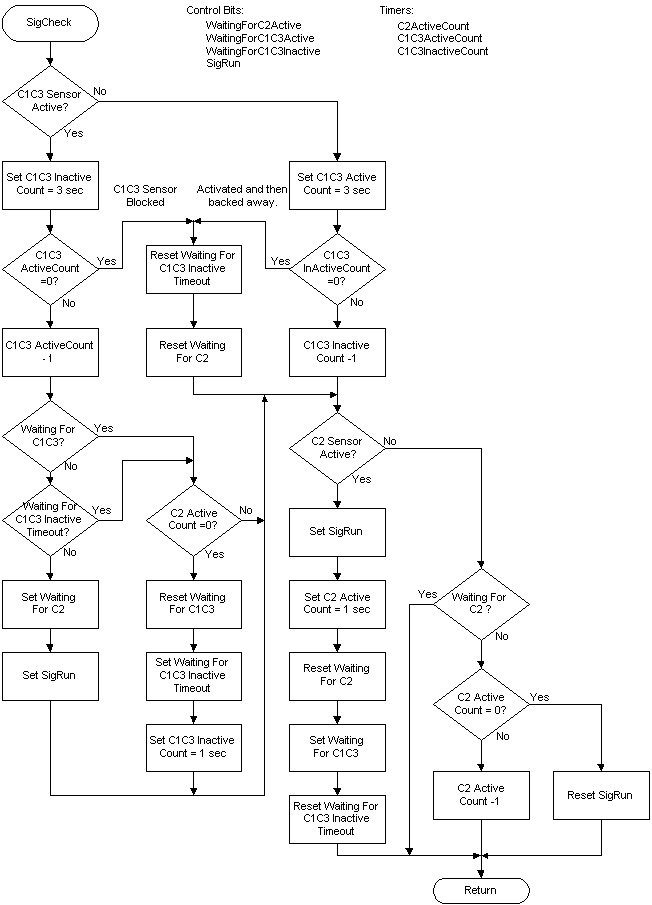
This page contains the documentation portion of the Basic Stamp 2 program that controls the grade crossings. The version 2 code improves the train detection logic and Led lamp simulation effect. The code has also been converted to PBASIC 2.5 to make the logic easier to understand. See a flow chart that details the train detection logic.
The complete code and documentation can be downloaded using this link: GradeCrossingV2.zip. The older code can be downloaded using this link: GradeCrossingV1.zip
' ====================================================================== ' GradeCrossingV2.bs2 4-14-2005 ' ' Grade Crossing Signal Control ' ' Note: This program is written using {$PBASIC 2.5} features. ' ' This program controls the signals at the grade crossings on the D&B ' model railroad. The circuit/program can support two grade crossings. ' There are two grade crossings on the layout; each with a single track. ' One of the grade crossings has gates controlled by a servo. Each grade ' crossing is composed of the following elements. ' ' | | ' | Road | ' east C2a| | west ' ~ ====================|==========|==================== ~ ' C1 | |C2b C3 ' | | ' Gate Servo Sound Module ' ' Three infrared sensors are used to detect train movement. C1 and C3 ' look across the track and are used to detect an approaching train. ' Sensor C2a/C2b looks diagonally across the track and road and detects ' the train as it crosses the road. ' ' Each grade crossing can include a sound effects module available from ' ICCT for singal bell and train noises. The program code switches between ' the two sounds based upon sensor input. The bell only sound is used ' when a train is detected by C1 or C3. The bell and train noise sound is ' used when a train is detected by C2. ' ' Each grade crossing can also include a crossing gate. The crossing gate ' is mechanically driven by an R/C servo which can be easily interfaced ' to the BS2 with no external components. The code varies the pulse width ' input to the servo to control its position. The final up and down postion ' of each gate and its speed are adjustable by minor changes to program ' constants. ' ' Program timing and the associated signal delays are set set by the PAUSE ' statement in the MainLoop routine. This value should be adjusted first ' if necessary to achieve the 3 second delay period; use a brief activation ' of C1 or C3 to trigger the code. Once set, the GateUp and GateDn constants ' can be adjusted if necessary for the gate positions. Finally, the GateRate ' constants can be adjusted for the desired gate speed. ' ' Hardware Description ' ' Refer to schematic sheet 5. Operationally, the design is train direction ' independent so sensors C1 and C3 can be connected to the BS2 using an ' "or" gate. This saves a BS2 I/O bit and simplifies the code. Each signal ' requires four BS2 I/O bits. Two are for the train sensors C1/C3 and C2. ' Each of the remaining two BS2 I/O bits connect to a lamp in the signals. ' All appropriate lamps from multiple signal stands at the grade crossing ' are wired in parallel. The flashing effect is created by changing the ' states of the BS2 I/O bits connected to the lamps. ' ' The BS2 I/O pins that drive the lamps are buffered using a ULN2803. This ' device can sync up to 500 milliamps of current which is adequate for ' driving most incandescent lamps. The circuit uses 6 volt lamps powered ' at 5 volts to reduce brightness for a more proto-typical appearance. A ' resistor in series with each lamp can reduce brightness further if ' necessary. ' ' An alternative lamp circuit using Led's is also shown. A single BS2 I/O ' pin can source up to 20 milliamps of current. Use care when connecting ' multiple Led's to the BS2 I/O pins. The total source current across all ' BS2 I/O pins should not exceed 40 milliamps. The 470 ohm resistor sets ' the led current to about 1 milliamp. Adjust this resistor value to ' obtain the desired Led brightness. ' ' As used in this design, the infrared emitter/detector pairs work ' reliably for a distance up to about 6 inches using the 100 ohm emitter ' diode resistor. This distance can be improved by lowering the emitter ' diode resistor value to increase current. Do not exceed the maximum ' continuous forward current rating of the emitter diode. Some optical ' shielding may be necessary to prevent stray infrared emissions from ' affecting other detectors. ' ' BS2 I/O bit sensor inputs for an unused signal position should be tied ' to ground. ' ' An input pin of the Basic Stamp is connected to an on/off switch and ' used to enable/disable the crossing sounds. Only the crossing sounds ' (bell, passing train) are affected. All other crossing gate related ' functions (flashing lights, gates) are not affected. ' ' An input pin of the Basic Stamp is connected to another dip switch and ' used to select normal or test mode program operation. When off (1), ' normal grade crossing functions as described herein are enabled. When ' on (0), test mode is enabled. A test/exercise routine is run in test ' mode. Crossing lights are each flashed three times. The crossing gates ' are lowered and sound 1 is played if enabled. The crossing gates are ' raised and sound 2 is played if enabled. Changing the switch from test ' to normal mode causes a software reset to be performed. All internal ' working variables are set to default conditions. ' ' The normal/test mode pin is also connected to a led that serves as a ' heartbeat indicator. ' ' The ICCT sound module contains a playback IC that is programmed with ' two sounds. The sound module contains its own volume control and audio ' amplifier that can drive a speaker directly. The sound module is wired ' to the BS2 to permit program control of the sounds. The sound start ' inputs to the sound module are programmed to be level sensitive. That ' is, a sound will playback continuously as long as its start input is ' active. If building the non-ULN2803 version of the circuit, the ' polarity of the sound start bits must be changed in the code from ' active high to active low. ' ' Each gate servo is connected directly to its corresponding BS2 I/O ' pin. No special drive circuits are required unless there is a very ' long distance between the BS2 and the servo. If erratic servo oper- ' ation is noted, try a shielded twisted pair cable. ' ' Software Logic ' ' Refer to the logic flow diagram for additional detail. ' ' 1. At program initialization, all timeout counters are set to zero. ' ' 2. A train approaching the grade crossing is detected by sensor C1 or ' C3. This causes the signals to begin flashing and the gate to begin ' lowering. Two retriggerable timeouts are also used to detect train ' movements prior to reaching the road and being detected by sensor C2. ' If the train stops, blocking sensor C1 or C3, the signals will be shut ' off after the C1C3Active timer expires. If the train backs away, the ' signals will be stopped after the C1C3Inactive timer expires. ' ' 3. When sensor C2 detects a train, the signals will begin flashing ' and the gates lowered if not already so. A 1 second retriggerable C2 ' timeout is initiated. This timeout will again be set to 1 second for ' any C2 sensor activity during the C2 timeout period. If no further C2 ' sensor activity is detected, the completion of the C2 timeout causes ' the signals to stop flashing and the gates to be raised. ' ' 4. C2 sensor activity also initiates control logic which causes the ' outbound train C1 or C3 sensor activity to be not acted upon as an ' approaching train. When C1 or C3 detectes the outbound train, the ' retriggerable C1C3Inactive timer is set to 1 second. Once the last car ' of the outbound train passes the C1 or C3 sensor, this timer will ' expire and reset the signalling cycle. ' ' 5. All Cx sensors are again monitored for activity which begins a new ' signaling cycle. ' ' Test Cases ' ' Case 1: A train is detected by C1 or C3 and then backs away. Operation ' 2 handles this case. ' ' Case 2: A train is detected by C1 or C3 and also C2 and then backs ' away. Operations 3 and 4 handle this case. ' ' Case 3: During the C1/C3 timeout operation 4, the train is backed up ' through the crossing. Operations 3 and 4 handle this case. ' ' Case 4: A short slow train is detected by C1 or C3 and stopped before ' C2 is reached. The C1/C3 timeout completes. If the train proceeds ' inbound, this case will be handled by operation 3. If it backs up, a ' new signaling cycle will begin when C1 or C3 is reached. ' ' Case 5: A short slow train is detected by C2 and stopped between C2 ' and the outbound C1 or C3 sensor. All timeouts complete and the signals ' are stopped. If the train proceeds outbound, operation 4 handles this ' case. If the train backs up, this case is handled by operation 3. ' ' Case 6: A long train is detected by C1 or C3 and stopped before C2 is ' reached. The C1/C3 inactive timeout completes because of a gap between ' the cars does not cause C1 or C3 sensor activity. When the train ' proceeds, action depends on which sensor activates first; C1/C3 or C2. ' If C2, this case is handled by operation 3. If the C1/C3 sensor, a new ' signaling cycle will begin. ' ' Case 7: A train is detected by C1 or C3 and stopped before C2 is reached. ' The C1/C3 active timeout completes because of solid C1 or C3 sensor ' activity (train stopped). When the train proceeds, action depends on ' which sensor activates first; C1/C3 or C2. If C2, this case will be ' handled by operation 3. If C1/C3 sensor, a new signaling cycle will ' begin. ' ======================================================================
Navigation: Grade Crossing D&B Home Buczynski.com Index
Copyright © 2006 Don Buczynski
San Diego, California
{kind=link}